- 외곽선 관련 함수
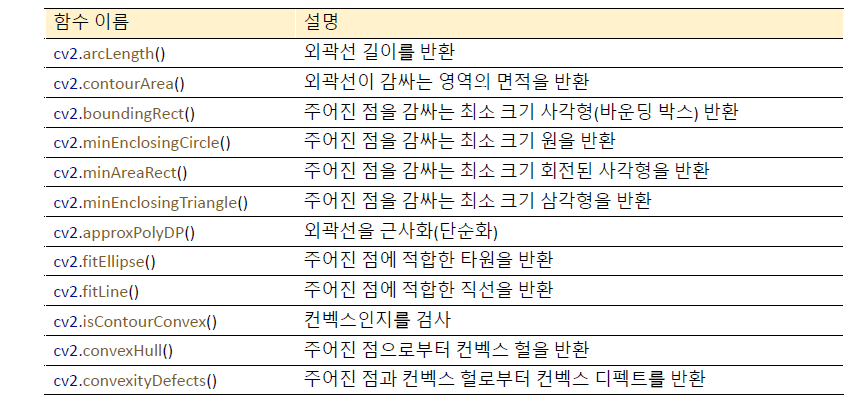
- 외곽선 길이 구하기
cv2.arcLength(curve,closed) -> retval • curve: 외곽선 좌표 . numpy.ndarray . shape=(K, 1, 2)
• closed: True 이면 폐곡선으로 간주
• retval: 외곽선 길이
- 면적 구하기
cv2.contourArea(contour,oriented=None) -> retval • contour: 외곽선 좌표 . numpy.ndarray . shape=(K, 1, 2)
• oriented: True 이면 외곽선 진행 방향에 따라 부호 있는 면적을 반환 기본값은 False.
• retval: 외곽선으로 구성된 영역의 면적
- 바운딩 박스(외곽선을 외접하여 둘러싸는 가장 작은 사각형) 구하기
cv2.boundingRect(array) -> retval • array: 외곽선 좌표 . numpy.ndarray . shape=(K, 1, 2)
• retval: 사각형 정보 . (x, y, w, h) 튜플
- 바운딩 서클(외곽선을 외접하여 둘러싸는 가장 작은 원) 구하기
cv2.minEnclosingCircle(points) -> center,radius • points: 외곽선 좌표 . numpy.ndarray.shape=(K, 1, 2)
• center: 바운딩 서클 중심 좌표. (x, y) 튜플.
• radius: 바운딩 서클 반지름. 실수.
- 외곽선 근사화
cv2.approxPolyDP(curve,epsilon,closed,approxCurve=None) -> approxCurve • curve: 입력 곡선 좌표. numpy.ndarray. shape=(K, 1, 2)
• epsilon: 근사화 정밀도 조절. 입력 곡선과 근사화 곡선 간의 최대 거리.
e.g) cv2.arcLength(curve) * 0.02
• closed: True를 전달하면 폐곡선으로 인식
• approxCurve: 근사화된 곡선 좌표. numpy.ndarray. shape=(K', 1, 2)

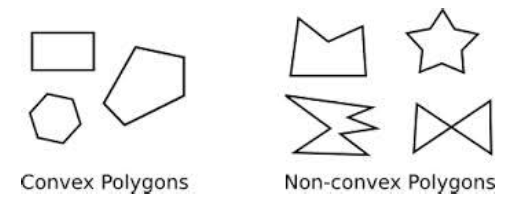
- Convex 검사
cv2.isContourConvex(contour) -> retval • contour: 입력 곡선 좌표 . numpy.ndarray . shape=(K, 1, 2)
• retval 컨벡스이면 True, 아니면 False.
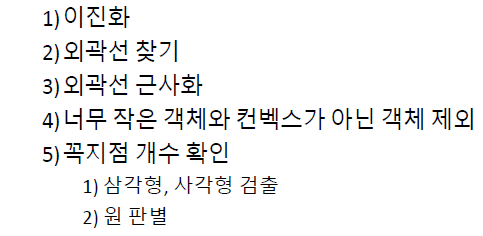
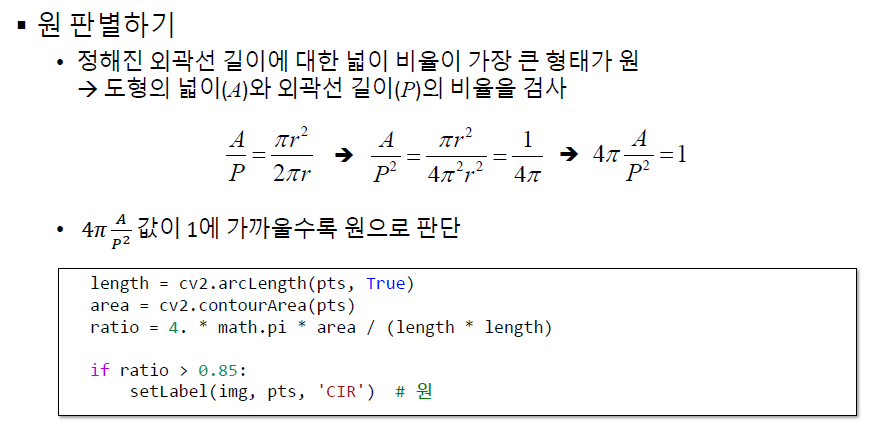
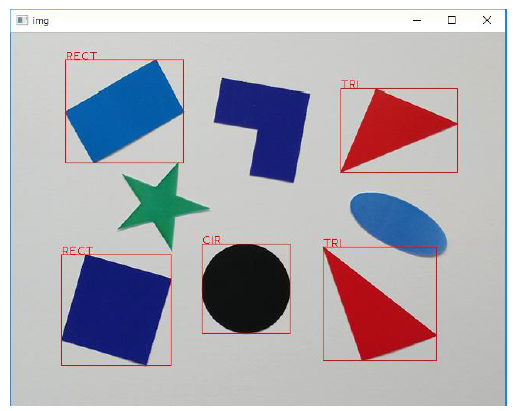
- 다각형 검출 프로그램
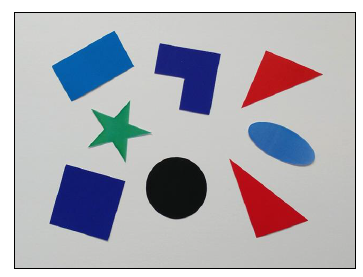
- 다양한 다각형 객체 영상에서 삼각형, 사각형, 원 찾기
- 구현 순서
- 다각형 판별 프로그램 예제
import math
import cv2
def setLabel(img,pts,label):
(x,y,w,h)=cv2.boundingRect(pts)
pt1=(x,y)
pt2=(x+w,y+h)
cv2.rectangle(img,pt1,pt2,(0,0,255),1)
cv2.putText(img,label,pt1,cv2.FONT_HERSHEY_PLAIN,1,(0,0,255))
def main():
img=cv2.imread('polygon.bmp',cv2.IMREAD_COLOR)
if img is None:
print('image load failed!')
return
gray=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
_,img_bin=cv2.threshold(gray,0,255,cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)
#도형들이 배경보다 밝은 사진이기 때문에 INV를 해주어야 한다
contours,_=cv2.findContours(img_bin,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_NONE)
# EXTERNAL을 통해 바깥쪽에 있는 것만 검출
for pts in contours:
if cv2.contourArea(pts)<400: #너무 작으면 무시
continue
approx=cv2.approxPolyDP(pts,cv2.arcLength(pts,True)*0.02,True) #외곽선 근사화
vtc=len(approx)
if vtc==3:
setLabel(img,pts,'TRI')
elif vtc==4:
setLabel(img,pts,'RECT')
elif vtc==10:
setLabel(img,pts,'STAR')
else:
length=cv2.arcLength(pts,True)
area=cv2.contourArea(pts)
ratio=4.*math.pi*area/(length*length)
if ratio>0.85:
setLabel(img,pts,'CIR')
elif 0.70<ratio<0.85:
setLabel(img,pts,'ELLIPSE')
else:
setLabel(img,pts,'POLY')
cv2.imshow('img',img)
cv2.waitKey()
cv2.destroyAllWindows()
if __name__ == '__main__':
main()
'Computer Vision > opencv(python)' 카테고리의 다른 글
| [48] 8.영상 분할과 객체 검출 1)그랩컷 (0) | 2021.03.24 |
|---|---|
| [47] 9) 명함 인식 프로그램 (0) | 2021.03.24 |
| [45] 7) 외곽선 검출 (0) | 2021.03.23 |
| [44] 6) 레이블링 (0) | 2021.03.23 |
| [43] 모폴로지(2): 열기와 닫기 (0) | 2021.03.23 |